
Avinash S Pramod
Robotics Researcher: Wearable Robotics | Human–Robot Interaction | Soft Robotics
Robotics Researcher: Wearable Robotics | Human–Robot Interaction | Soft Robotics
Welcome! I am Avinash S Pramod, and I did my MS and PhD in Robotics from the Department of Engineering Design, Indian Institute of Technology Madras, and my B.Tech in Mechanical Engineering from Vimal Jyothi Engineering College. My research focuses on wearable robotics, biomechanical mechanisms, human–robot interaction, rehabilitation robotics, exosuit and exoskeleton design, mobile robotic systems, soft robotics, and serial manipulators. I specialize in the design, modeling, prototyping, and experimental validation of intelligent robotic systems, with key contributions to human-centric robotics.
| Education | Year | Department | University |
|---|---|---|---|
| M.S + Ph.D. | 1st Jan 2020 – 29th Aug 2025 | Engineering Design (Robotics) | IIT Madras |
| B.Tech | 17th Aug 2015 – 17th Aug 2019 | Mechanical Engineering | Vimal Jyothi Engineering College, Kannur (KTU) |
| Role | Organization | Year | Details |
|---|---|---|---|
| Senior Research Fellow (SRF) | IIT Madras | 18th Aug 2023 - 31st Aug 2025 | Worked on the project "Development of a wearable upper limb exoskeleton mechanism for reducing interaction forces due to misalignment". |
| Junior Research Fellow (JRF) | IIT Madras | 9th Aug 2021 - 17th Aug 2023 | Worked on the project "Development of a wearable upper limb exoskeleton mechanism for reducing interaction forces due to misalignment". |
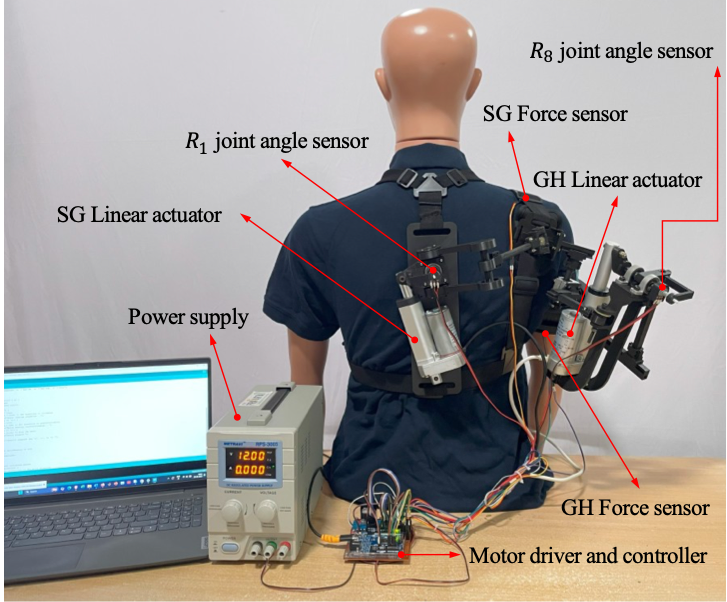
A human-centered shoulder exoskeleton designed and developed to reduce interaction forces due to misalignment between human and robot joint axis.
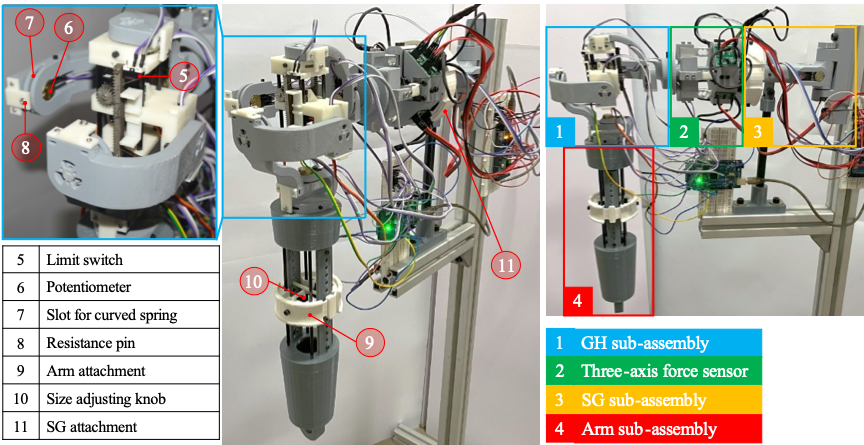
A shoulder phantom for testing upper-limb exoskeletons for their maximum range of motion and self aligning capability in a controlled experimental setup.
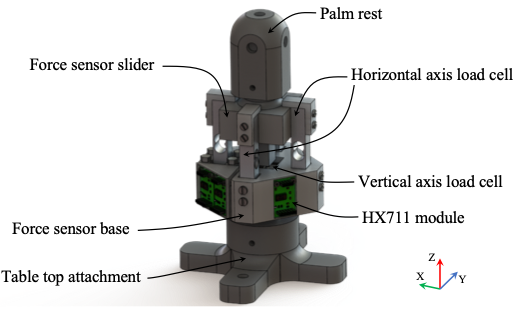
An isometric training monitoring device equipped with a three-axis force sensor to provide real-time feedback for rehabilitation exercises.
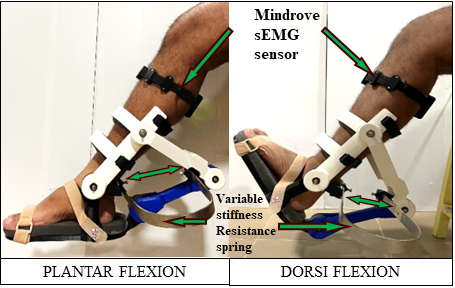
A wearable passive ankle foot exoskeleton with a curved spring setup developed for variable resistance training during plantarflexion and dorsiflexion motion.
A fuzzy-based closed-loop control for Soft Bidirectional Bending Actuator (SBBA) using visual feedback to regulate the actuator input pressure.
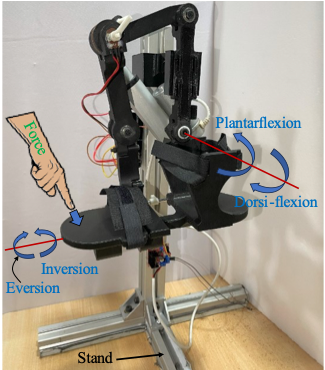
A wearable active ankle foot exoskeleton having single actuator developed for resistance training (plantarflexion/ dorsiflexion and inversion/ eversion).
A robot designed to automate poultry farm tasks including sawdust racking, heating the sawdust bed, laying sawdust and cleaning.

A semi-autonomous agricultural robot designed for sowing seeds and watering based on the soil moisture content, for efficient farming operations.

Name: Dr. Avinash S Pramod (Ph.D.)
Email: avinashspramod@gmail.com